State Modeling Plugin
The StateModelingPlugin is a factory plugin that provides components used in state modeling.
State modeling is a catch-all term for how we represent quantities to be estimated (states),
sensor measurements, and how they all relate to one another.
State modeling in pntos-python uses a multi-tiered factory structure that begins with the
StateModelingPlugin. The plugin is used to generate one or more StateModelProviders.
Each StateModelProvider is a collection of state modeling components that can be used to populate a
fusion engine. Currently, pntos-python has one API-defined StateModelProvider called
the StandardStateModelProvider. This class is also a factory, and as its name
suggests, provides state modeling components for the pntOS Standard Model. This model includes:
StandardStateBlocks which define a set of states and provide a means to propagate them via theStandardDynamicsModelStandardMeasurementProcessors which relate measurements to a set of statesVirtualStateBlocks which relate one set of states to another (transformation)
The next few sections will discuss particular points of the API and the existing Standard Model implementations in more depth.
State Modeling API
StateModelingPlugin
As mentioned above, the StateModelingPlugin itself is essentially a generator
of StateModelProviders. It, like many of the elements described in this document, use the
factory pattern. In addition to everything inherited from CommonPlugin,
there are two additional functions: one that generates a new StateModelProvider of a specified type…
564 @abstractmethod
565 def new_state_model_provider(
566 self, fusion_type: type[StateModelProviderType]
567 ) -> StateModelProviderType | None:
…and one that reports if the plugin can generate a model of a given type:
549 @abstractmethod
550 def is_fusion_type_supported(
551 self, fusion_type: type[StateModelProviderType]
552 ) -> bool:
Both of these are generics that depend on the TypeVar StateModelProviderType:
536StateModelProviderType = TypeVar(
537 'StateModelProviderType', StandardStateModelProvider, Any
538)
Note
There is no base class StateModelProvider that provides core
elements required by any fusion approach. Rather a StateModelProvider is any class that:
Can provide a set of state modeling elements that satisfies the needs of some
FusionEngineIs a member of the
TypeVarStateModelProviderType
Class entries in StateModelProviderType do not have to be related at all.
StateModelProvider
Just as the StateModelingPlugin is a factory that provides one or more types of StateModelProviders,
a StateModelProvider is a factory that provides one or more elements that represent a piece of the
fusion puzzle. For instance, the StandardStateModelProvider can provide
StandardStateBlocks that represent states in a filter and their dynamics. Any fusion
engine that understands StandardStateBlocks (or anything else a StandardStateModelProvider generates)
may make use of any providers of this type.
StateModelProviders use the same typing approach as the StateModelingPlugin to describe the set of available models:
536StateModelProviderType = TypeVar(
537 'StateModelProviderType', StandardStateModelProvider, Any
538)
Currently, the only explicitly defined StateModelProviderType is the StandardStateModelProvider.
Each provider will be designed to work with a specific type of fusion approach and thus must be
described individually. The StandardStateModelProvider is covered in the next section.
StandardStateModelProvider
The StandardStateModelProvider generates 3 types of objects that enable sensor fusion for the EKF and similarly structured estimators:
The
StandardStateBlockmodels a fixed-size block of related values that need to be estimated, known as states. It implicitly defines the frames and units associated with each state via documentation. It is also a factory that provides, through theStandardDynamicsModel, the dynamics terms an EKF or similar estimator requires to propagate its states in time.The
StandardMeasurementProcessoris a factory that producesStandardMeasurementModels that relate a measurement to one or more StateBlocks, used in the filter update step.The
VirtualStateBlockis an optional convenience class that performs transforms of state vectors and covariances.
For each of the 3 types of objects the StandardStateModelProvider generates, it has a list of labels that refer to a specific implementation of that object and a bespoke generator function. For instance, the set of available MeasurementProcessors is described by the class member:
processor_identifiers: list[str] | None
New processors are generated by evoking:
@abstractmethod
def new_processor(
self,
processor_index: int,
engine: StandardFusionEngine | None,
label: str,
state_block_labels: list[str],
config_group: str | None,
) -> StandardMeasurementProcessor | None:
Note that this function takes an int for the first argument to define which processor should be generated,
rather than a str label. The proper argument is the location of the processor name in the processor_identifiers list,
found via StandardStateModelProvider.processor_identifiers.index('my processor') or similar.
The other two objects are created in a like manner and their instantiation is not covered further here.
Next, we’ll discuss the three objects the StandardStateModelProvider generates: StandardStateBlock,
StandardMeasurementProcessor and VirtualStateBlock.
StandardStateBlock
The StandardStateBlock is responsible for defining a specific set of jointly
Gaussian states (described by a state estimate vector and covariance matrix) and how those terms change
with respect to time and other system inputs. Examples include a scalar temperature,
a 3 dimensional point in space, or a collection of error terms associated with a physical sensor.
Each StandardStateBlock has a fixed label that is used to
refer to it and a num_states field that describes the length
of the state vector associated with the StateBlock.
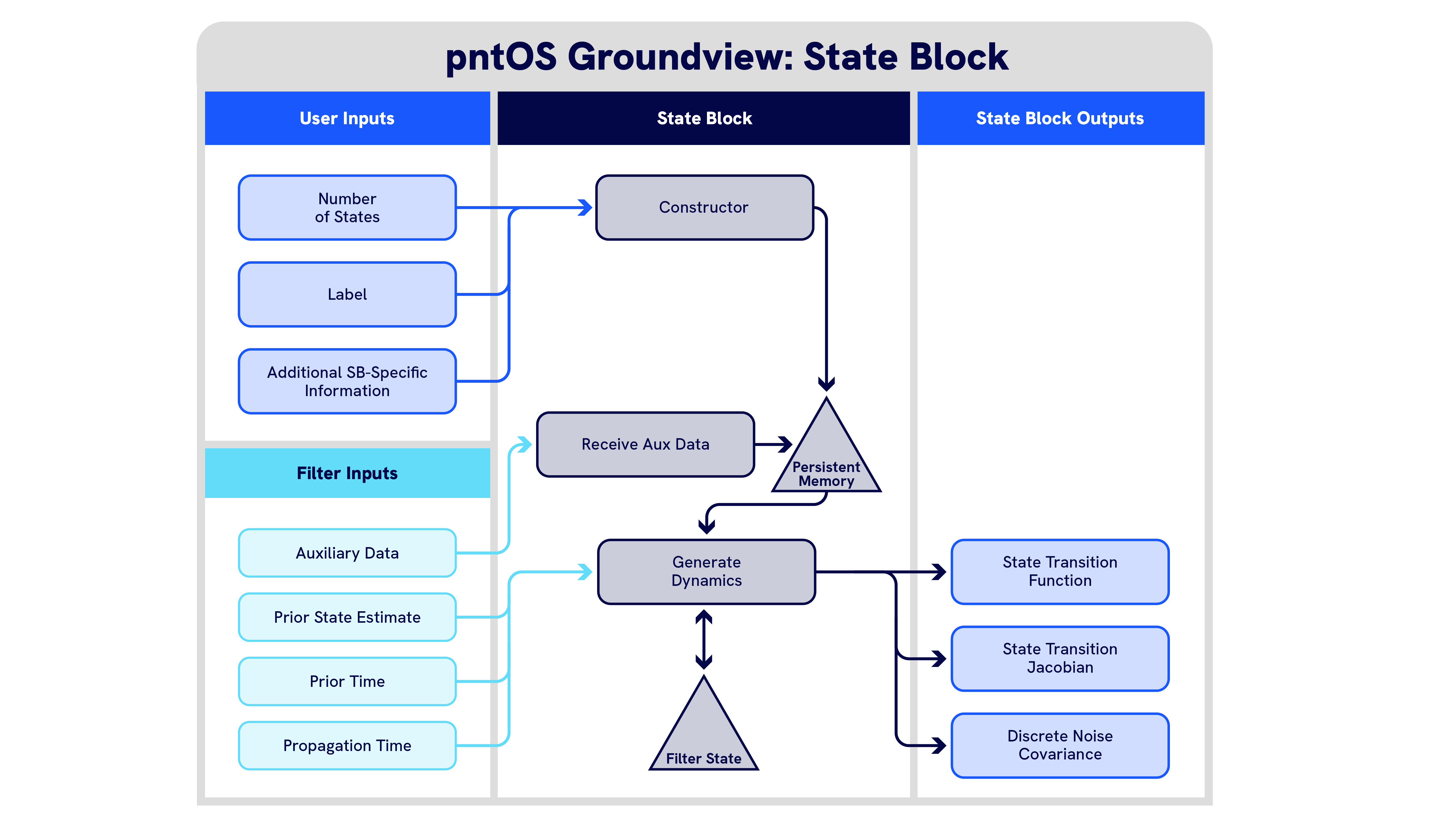
The primary use of a StandardStateBlock is to generate the StandardDynamicsModel
that propagates a set of states forward in time.
@abstractmethod
def generate_dynamics(
self,
gen_x_and_p_func: GenXandP,
time_from: TypeTimestamp,
time_to: TypeTimestamp,
) -> StandardDynamicsModel | None:
Note
All discrete time equations in this document use the subscript shorthand \(t_k \rightarrow k\) for legibility.
In terms of the EKF propagation equations
the StandardDynamicsModel provides \(g(x, u)\), \(\Phi\), and \(Qd\). The terms
\(x_k\), \(t_k\) and \(t_{k + 1}\) all correspond to the arguments to generate_dynamics. Control
(or any other) inputs \(u\) that \(g()\) requires are not explicitly passed to generate_dynamics but are
provided through receive_aux_data():
@abstractmethod
def receive_aux_data(self, aux: list[Message | None]) -> None:
The StandardStateBlock is responsible for managing any aux data passed to it and ensuring the correct
values are used in any given evaluation of generate_dynamics. Below is a diagram outlining
construction of a StandardStateBlock, and data flow from the filter to the block in order to generate
new StandardDynamicsModels.
StandardMeasurementProcessor
The StandardMeasurementProcessor is a class that defines how a measurement relates
to one or more states being estimated. Similar to the StandardStateBlock, it
features a label for identification and a
receive_aux_data() to accept data
required to generate its models. Additionally it has a state_block_labels
field that tracks all the StateBlocks this processor can generate models against.
There are two important behaviors related to state_block_labels that are worth noting:
The order of the labels matters. If more than one label is present, then any model terms should be generated in the order that the labels appear in the list. The
GenXandPfunctions must adhere to the same rule.The list may be modified by the processor. For instance, a StandardMeasurementProcessor is free to add so-called nuisance states to the
StandardFusionEngineviaadd_state_block(), in which case it should extendstate_block_labelsaccordingly.
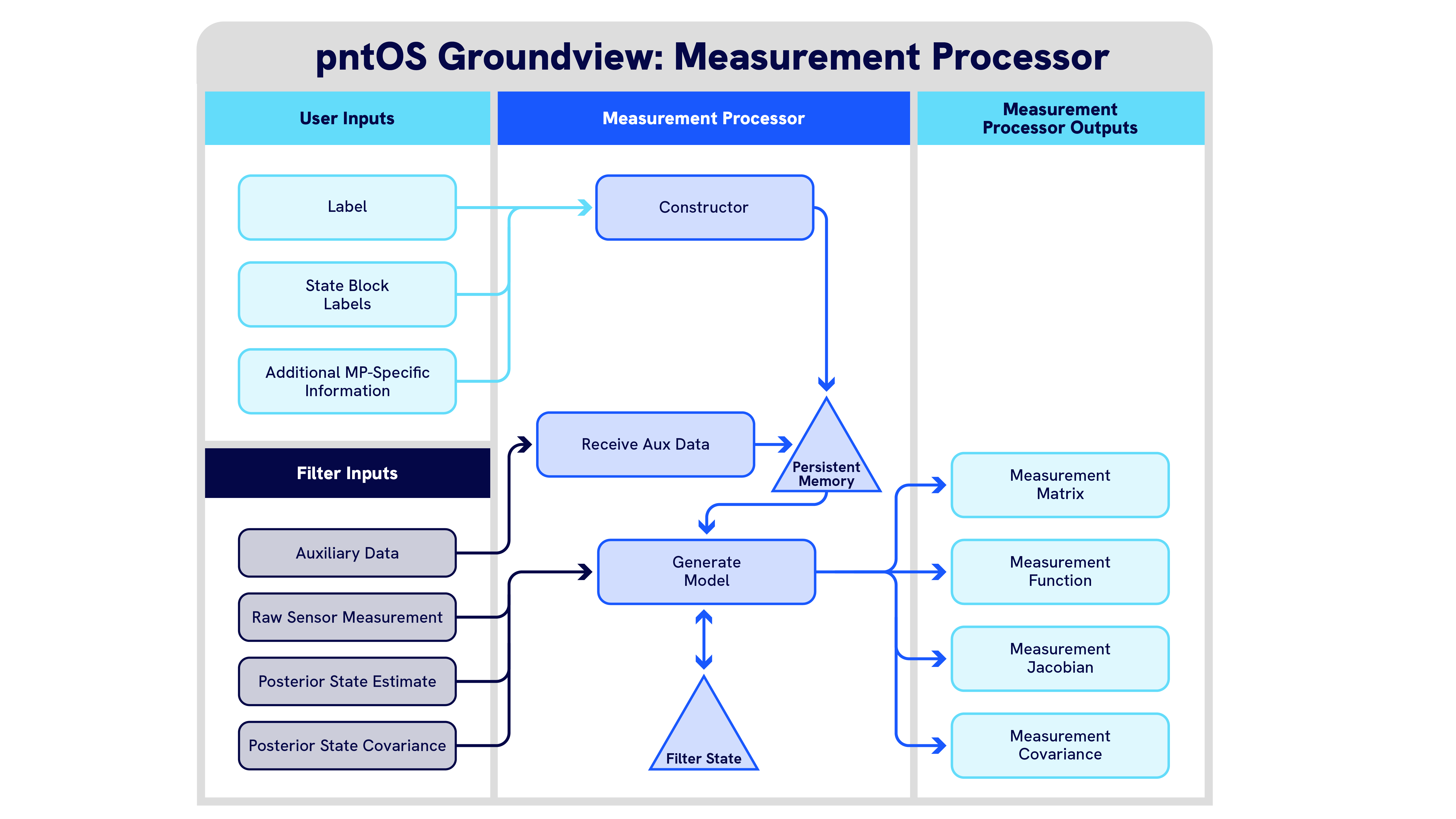
The StandardMeasuremementProcessor generates StandardMeasurementModels by way of the
generate_model() function:
@abstractmethod
def generate_model(
self, message: Message, gen_x_and_p_func: GenXandP
) -> StandardMeasurementModel | None:
In this case the function takes 2 inputs- a measurement of some kind, and a function that can provide
the current estimate and covariance of the state blocks referred to in state_block_labels.
If the processor can interpret the provided measurement and has been passed any additional required data through receive_aux_data
then it may generate a StandardMeasurementModel which may be used to perform an update.
Note that it is permissible for a single MeasurementProcessor to process multiple types of measurement inputs; for example,
generating an altitude update model from any ASPN measurement that contains an altitude or related value.
It is also allowable to process similar measurements from multiple data sources. The only requirement is the measurement can be
related to the states in state_block_labels. Care must be taken in this case
if state_block_labels contains any sensor-specific
states (e.g. lever arm, bias terms) that models do not incorrectly relate measurements to these states.
In terms of the EKF update equations
the StandardMeasurementModel provides \(z\), \(h(x)\), \(H\) and \(R\).
Below is a diagram outlining construction of a StandardMeasurementProcessor, and data flow from the
filter to the processor in order to generate new StandardMeasurementModels.
VirtualStateBlock
The purpose of a VirtualStateBlock is to provide a mapping
between one standard state representation (Gaussian estimate and covariance) and another. Among other things,
this allows measurement models that were written against a particular state representation
to be used with other states, so long as a continuous mapping exists. For example, if a filter
was tracking a state vector containing Earth-centered, Earth-fixed (ECEF) states,
but a measurement model used latitude-longitude-altitude (LLA), a VirtualStateBlock that implemented
the conversion from ECEF to LLA could be used to bridge the gap between them.
Mathematically speaking we are just decomposing functions into a compositions of functions.
To illustrate, suppose a StandardMeasurementModel was
available and provided the standard model terms with respect to some state vector x:
If the filter has a state representation y, and there exists a continuous and differentiable
function that maps y to x
then the VirtualStateBlock can provide g(), which can be used to make h() a function of y:
H can similarly be mapped using only the derivative of g(y) provided by the VirtualStateBlock
due to the chain rule:
Also due to the chain rule, multiple VirtualStateBlocks may be deployed in sequence to provide a series of mappings, e.g. \(x = g(f(e(y)))\)
To support these operations, a VirtualStateBlock must implement the following functions:
convert_estimate()maps one state vector representation to another; equivalent to \(g(y)\).
@abstractmethod
def convert_estimate(
self, estimate: NDArray[float64], time: TypeTimestamp
) -> NDArray[float64]:
jacobian()returns the partial derivative of \(g(y)\) w.r.t. \(y\), a.k.a. \(G\):
@abstractmethod
def jacobian(
self, estimate: NDArray[float64], time: TypeTimestamp
) -> NDArray[float64]:
convert()is a convenience function that not only maps \(x = g(y)\) but the associated covariance of \(y\) into \(x\)-space as well:
@abstractmethod
def convert(
self,
estimate_with_covariance: EstimateWithCovariance,
time: TypeTimestamp,
) -> EstimateWithCovariance:
Finally, if \(g(y)\) requires any additonal inputs other than \(y\) to be evaluated, they may be passed in through the
receive_aux_data()function:
@abstractmethod
def receive_aux_data(self, aux: list[Message | None]) -> None:
Note that use of VirtualStateBlocks is entirely optional and can contribute significant overhead in some cases. In resource-constrained applications, use of measurement processors that interact with non-virtual states directly is recommended.
Cobra Implementation: StandardStateModelingPlugin
The StandardStateModelingPlugin
is a simple factory class that only provides objects the pntos.cobra.internal.StandardStateModelProvider,
which is an implementation of the API class of the same name.
StandardStateModelProvider
As with the StandardStateModelingPlugin, the
StandardStateModelProvider is just a factory that follows a
pretty standard template. However, this class makes available a number of other classes that assist
in modeling IMU errors. These are summarized in the following tables.
MeasurementProcessors
Class and Identifier |
Accepted Measurements |
Required StateBlocks |
Description |
|---|---|---|---|
|
MeasurementPosition (Geodetic) |
pinson |
Direct update of pinson position error states via the delta between input measurement and nominal (aux data) positions.Includes lever arm correction via configuration. |
|
MeasurementVelocity (NED) |
pinson |
Direct update of pinson velocity error states via the delta between input measurement and nominal (aux data) velocities.Measurement and nominal NED frames are assumed coincident. |
|
MeasurementPosition (Geodetic) |
pinson, fogm (3) |
As |
|
MeasurementPosition (Geodetic), MeasurementAltitude,MeasurementPositionVelocityAttitude(Geodetic) |
pinson, fogm (1) |
Generates an altitude error update via the delta between the measurementaltitude and the nominal, with a FOGM-modeled altitude sensor bias in meters. |
|
MeasurementPosition (Geodetic) |
pinson,fogm (3),fogm (3) |
As |
|
MeasurementVelocity (Sensor) |
pinson |
Updates pinson velocity error states using a velocity measurement in anarbitrary, platform-fixed sensor frame, where the lever-arm and orientationbetween the sensor and platform are known and provided throughconfiguration. |
|
MeasurementPositionVelocityAttitude (Geodetic) |
pinson |
A processor that effectively joins |
|
MeasurementPosition (Geodetic) |
PVA states, fogm (3) |
A position update for whole-valued PVA states. Can be used with |
|
MeasurementDirection3DToPoints |
pinson |
Updates pinson error states using the difference between the predictedand measured lateral and down units vectors pointing to featureswhose locations are known. |
Note
In the above table
Required frames noted in parentheses refer to an ASPN23 frame, usually indicated by the
reference_framemember of the message. If no frame is listed any are acceptable.Numbers in parantheses indicate the required number of states a particular state block must have.
pinsonrefers to any state block that adheres to our typical pinson state layout, meaning 9 PVA related states followed by sensor error states. This means that one could provide an ‘extended’ pinson model that adds additional states to the end of thePinson15NedBlockand the processor will still work.PVA states means whole-valued states; see the linked processor for more details.
StateBlocks
Class |
Identifier |
Description |
|---|---|---|
pinson15 |
A state block that models INS error states. |
|
fogm |
A configurable-length set of FOGM-modeled states. |
|
clock_bias |
Models a clock bias and 1-2 derivative terms. |
|
constant |
A configurable-length set of constant model states. |
VirtualStateBlocks
Class |
Identifier |
Description |
|---|---|---|
pinson_error_to_standard |
Maps |
|
state_extractor |
Extracts a subset from a larger set of states, preserving frames, units etc. |